Haptic Research @ The Klatzky Lab CMU
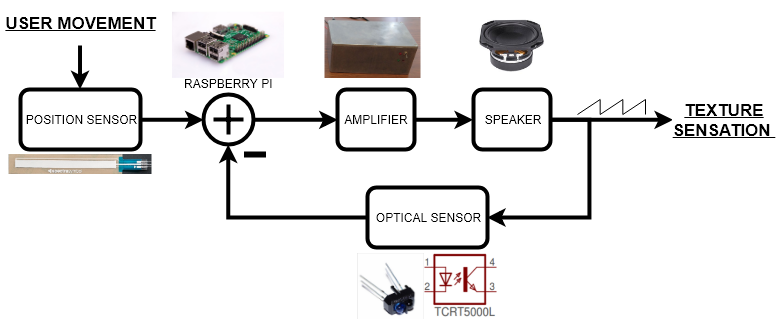
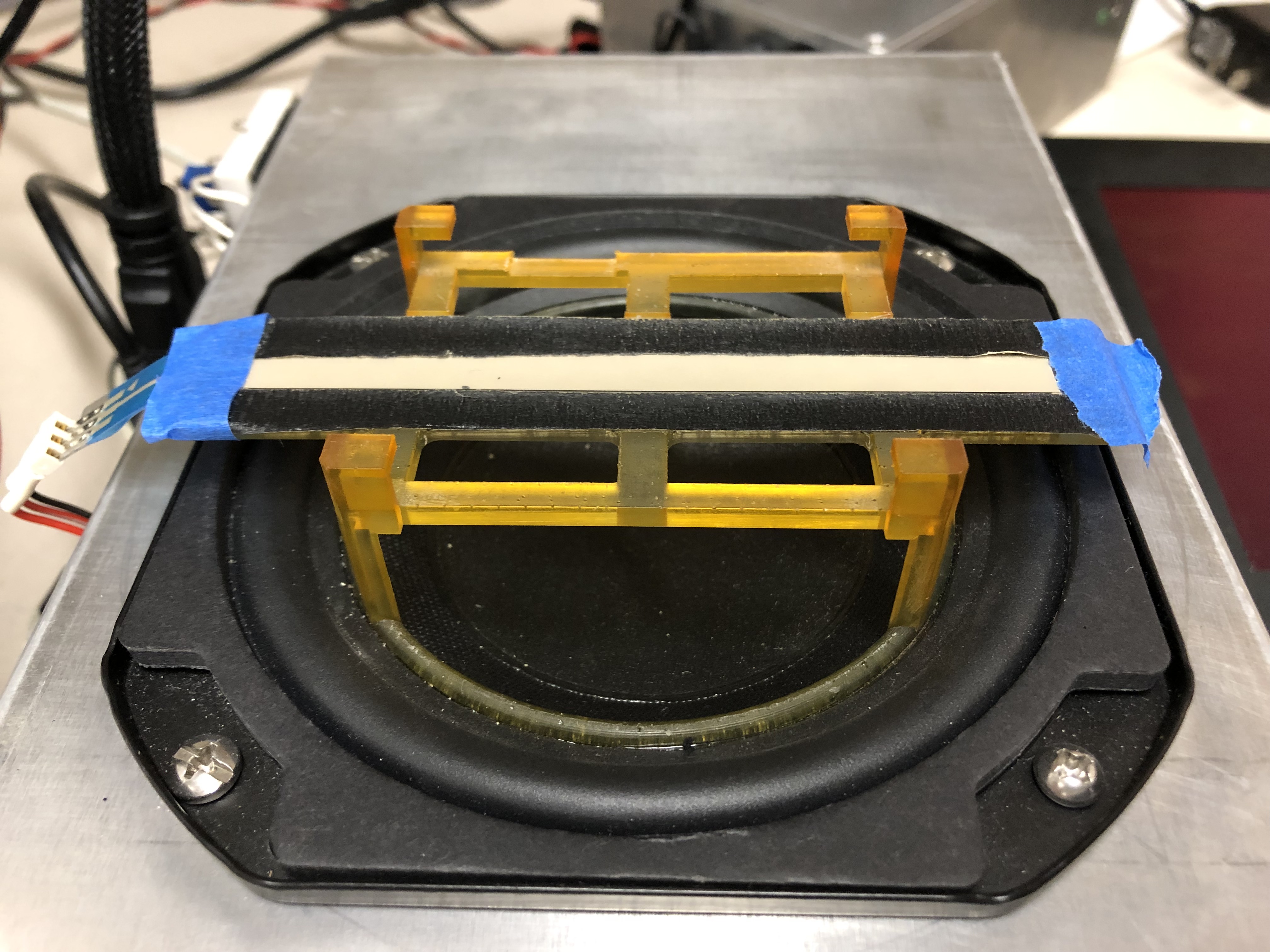
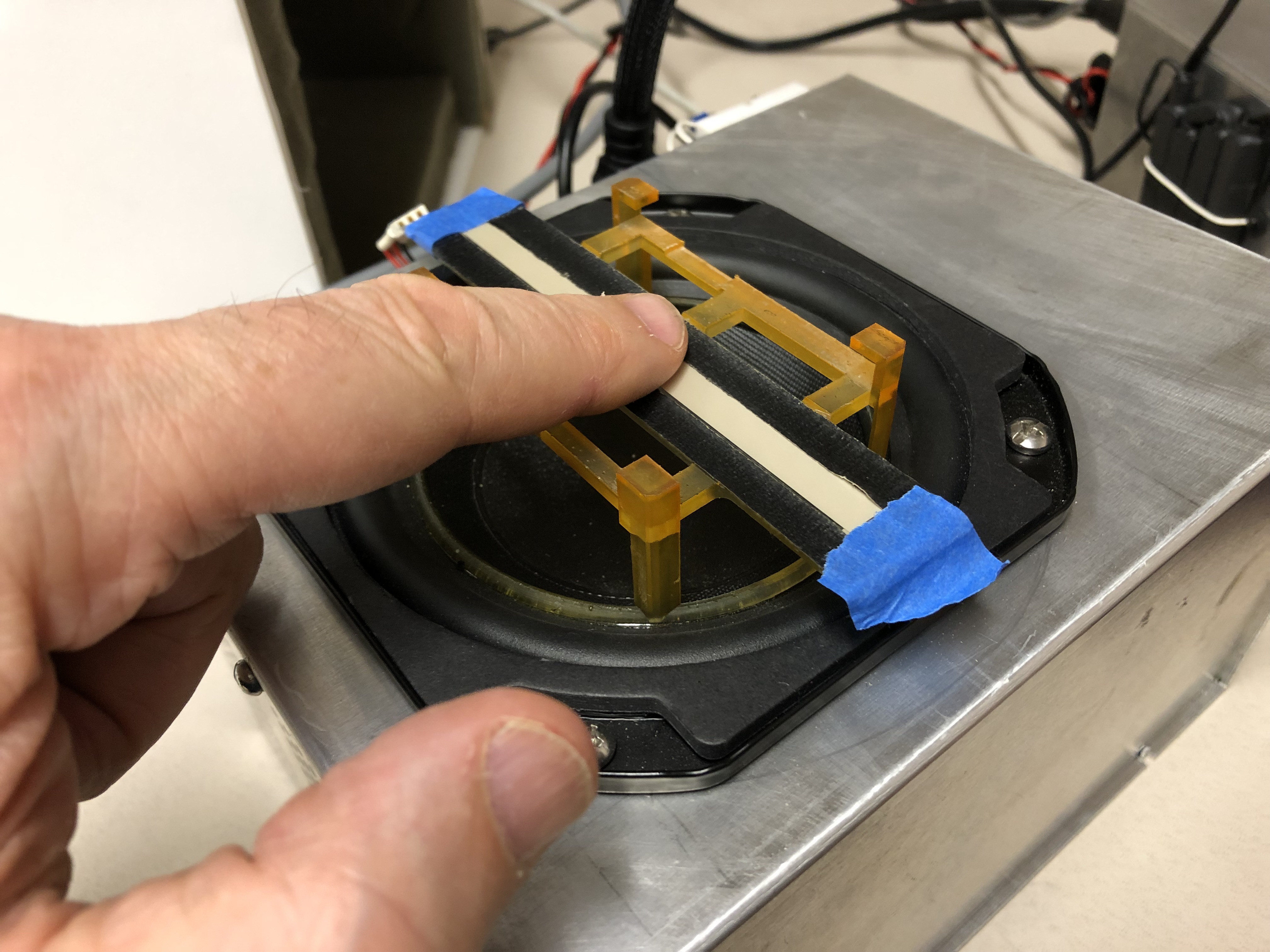
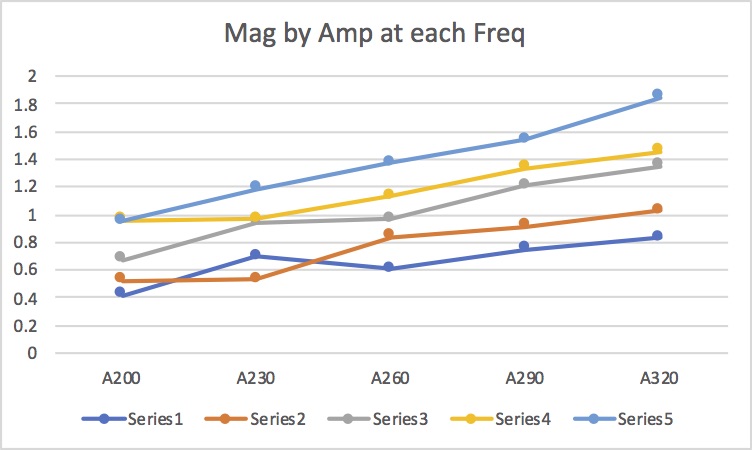
I have been working with Prof. Klatzky on bringing texture to flat touchscreens. This research project uses a loudspeaker that vibrates fingers at various amplitudes and frequencies to mimic the roughness of a surface. Potential applications could include creating a more realistic online shopping experience, or incorporating texture to a VR environment. I conducted user studies, data collection and analysis, and debugged the mechanical, electronics, and software systems. Paper submitted to IEEE Transaction on Haptics.